درباره من

برق صنعتی-نرم افزار -آموزش نرم افزار-کتاب -جزوه-کلیپ-عکس-پی ال سی-الکترونیک -شبکه-انتقال توزیع-تاسیسات الکتریکی-مقاله-پروژه برق-پایان نامه -وبلاگ جامع برق-همه چی درباره برق-مطالب جامع و آموزشی در زمینه برق-برق ساختمان-سیستم های حفاظتی - مقاله برق - مقاله - کنترل - پی ال سی - شبکه های قدرت - انتقال توزیع - تاسیسات الکتیکی -دانلود کتاب برق+جزوه برق+مقاله برق+پروژه +دانلود کتاب برق+جزوه برق+مقاله برق+پروژه+ همه و همه در این وبلاگ
پيوندهاي روزانه
موضوعات وبلاگ
- کلیپ
- فروشگاه
- برق - قدرت
- برق - رباتیک
- برق - مخابرات
- برق - الکترونیک
- برق - تاسیسات
- نرم افزارهای برق
- برق - انتقال و توزیع
- برق - کنترل و ابزار دقیق
- کتاب های تخصصی برق
- كنفرانس بين المللي برق
- مقالات و پروژه و گزارش کار
- فیلم آموزش نرم افزار LabView
- فیلم آموزش نرم افزار MATLAB
- حل المسائل و جزوات درسی برق
- آموزش و معرفی نرم افزارهای برق
- کالای برق صادقی نیا
پيوندها
- elect
- ایران برق
- برق صنعتی
- مهندسی برق
- نرم افزار ETAP
- مرجع مقالات برق
- كــارگاه اديــــــسون
- بچه های مماری88
- تاسیسات الکتریکی
- مهندسی برق و الکترونیک
- وبلاگ جامع برق و مخابرات
- مقالات و مطالب تاسيسات
- مقالات رایگان در تمام زمینه ها
- مقالات برق الکترونیک و کامپیوتر
- گروه کامپیوتر دانشجویان دارالفنون
- انجمن علمی برق دانشگاه هرمزگان
- دانشکده کشاورزی دانشگاه صنعتی شاهرود
- آموزش نرم افزارهای برق بصورت تصویری و جزوه
-
همانطور كه ميدانيم سرعت موتورهاي قفس سنجابي، بستگي به فركانس منبع تغذيه و تعداد جفت قطبها دارد. بنابراين براي داشتن موتورهاي دو سرعته و بيشتر،ميتوانيم با به هم پيوستن سيم پيچهای استاتور، تعداد قطبهاي متفاوتي داشته باشيم. اين موتورها ميتوانند سرعتي به نسبت ۱/۲(یک به دو)داشته باشند.
تعداد ترمينالها در اين نوع موتورها شش ترمينال مي باشد.
نوع ديگري از موتورها، موتورهاي با دو سيم پيچي مجزا مي باشند. اين نوع موتورها ميتوانند دو سرعت با هر نسبتي داشته باشند.
هر چند مشخصات الكتريكي آنها با درك اين واقعيت كه سيم پيچهاي دور كم ناگزير بايستي استرس هاي مكانيكي و الكتريكي حالت دور زياد را هم تحمل كنند، تحت تاثير قرار مي گيرند. بنابراين گاهي اوقات اين موتورها در دور كم جرياني بيشتر از حالت دور زياد مي كشند.
همانطور كه ميدانيم سرعت موتورهاي قفس سنجابي، بستگي به فركانس منبع تغذيه و تعداد جفت قطبها دارد. بنابراين براي داشتن موتورهاي دو سرعته و بيشتر،ميتوانيم با به هم پيوستن سيم پيچهاي استاتور، تعداد قطبهاي متفاوتي داشته باشيم. اين موتورها ميتوانند سرعتي به نسبت ۱/۲(یک به دو)داشته باشند.
تعداد ترمينالها در اين نوع موتورها شش ترمينال مي باشد.
نوع ديگري از موتورها، موتورهاي با دو سيم پيچي مجزا مي باشند. اين نوع موتورها مي توانند دو سرعت با هر نسبتي داشته باشند.
موتورهاي با سيم پيچي دالاندر (Dahlander motors) :
الف) سيم بندي ستاره-ستاره ستاره(ستاره دوبل) Y/YY
اين موتورها در حالت كلي مطابق شكل (1) سيم پيچي شده اند.
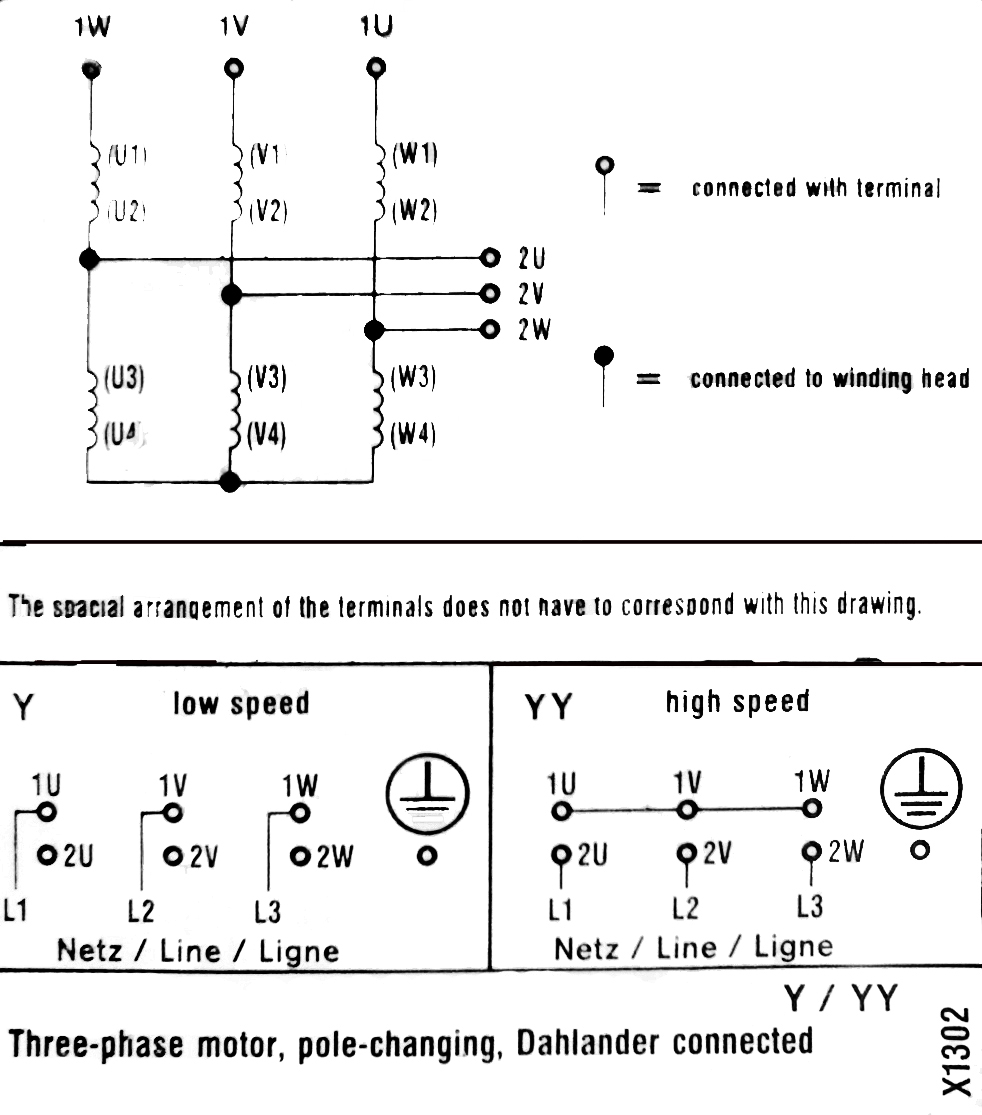
Y/YYشكل (1) موتور دالاندر-سيم پيچها و نحوه اتصالات
به منظور راه اندازي موتور در دور كم، منبع تغذيه به ترمينال هاي(1U,1V,1W) وصل شده و ترمينالهاي (2U,2V,2W) دست نخورده باقي مي مانند. در اين حالت موتور به صورت ستاره Y راه اندازي مي شود. در اين حالت با توجه به سري بودن سيم پيچهاي هر فاز،موتور با جريان كمتري راه اندازي مي گردد.(و همچنين توان كمتر). شكل 2-الف
جهت استفاده از اين موتورها در دور زياد، منبع تغذيه به سرهاي (2U,2V,2W) وصل شده و سرهاي (1U,1V,1W) به هم متصل مي شوند.در اين روش مطابق شكل 2-ب موتور به صورت YY مورد استفاده قرار مي گيرد. در اين حالت تعداد قطبها نصف و در نتيجه طبق رابطه N=120*F/P سرعت دو برابرمي گردد. همچنين با توجه به شكل مقاومت سيم پيچهاي هر فاز كمتر شده و در نتيجه جريان راه اندازي افزايش مي يابد. (همچنين توان موتور افزايش مي يابد)
نكته 1: وجود نقص در اتصال پايانه هاي(1U,1V,1W) باعث آسيب ديدگي سيم پيچها مي گردد.
نكته 2: در سيستم مدار قدرت (كنترل با كنتاكتور) كنتاكتور مربوط به ستاره باید قبل از كنتاكتور اصلي YY (دور زياد-ستاره دوبل) بسته شود.
ب) دور زیاد الف) دور کم
شکل۲
ب) سيم بندي مثلث- ستاره دوبل(Δ/YY)
اين موتورها در حالت كلي مطابق شكل (3) سيم پيچي شده اند.
شکل ۳
توضيحات مربوط به حالت Y/YY در مورد اين نوع سيم بندي(Δ/YY) نيز بكار مي رود.
شكل 4 الف و ب به ترتيب نوع سيم بندي مثلث(دور كم) و ستاره دوبل (دور زياد) را نشان مي دهد.
ب) دور زیاد الف) دور کم
شکل ۴
در شكل 5 مدار قدزت مربوط به موتورهاي دو سرعته دالاندر را مشاهده مي كنيم.توضیح اینکه در حالت دور کند کنتاکتور C1 بسته و دو کنتاکتور دیگر باز هستند و در دور تند عکس این حالت صادق است.
شکل ۵
استفاده از دو سیم پیچ مجزا:
استاتور این نوع موتورها از دو سیم پیچ مجزا برای دورهای کم و زیاد ساخته شده است.
در این روش نیز مانند روشهای بالا برای دور کم مطابق شکل 6 منبع تغذیه به سرهای (1U,1V,1W) وصل شده و پایانه های دیگر بدون تغییر باقی می مانند.برای دور زیاد عکس این موضوع صادق است.
هر چند مشخصات الكتريكي آنها با درك اين واقعيت كه سيم پيچهاي دور كم ناگزير بايستي استرس هاي مكانيكي و الكتريكي حالت دور زياد را هم تحمل كنند، تحت تاثير قرار مي گيرند. بنابراين گاهي اوقات اين موتورها در دور كم جرياني بيشتر از حالت دور زياد مي كشند.
موتورهاي سه يا چهار سرعته نيز مي توانند با تغيير قطب ها روي سيم پيچ هاي استاتور ساخته شوند. البته اين روش نياز به افزودن اتصالاتي روي سيم پيچها دارد.
مدار قدرت این نوع موتورها شبیه موتور دالاندر است با این تفاوت که برای این نوع موتورها به کنتاکتور C2 نیازی نیست.
شکل ۶
نکته:
چنانچه میدانیم در موتورهای القایی تعداد قطب های روتور و استاتور برابرند. استفاده از روشهای بالا برای روتورهای سیم پیچی شده چندان ساده نیست، زیرا باید سر سیم های روتور از حلقه های لغزان جدا شده تا آرایش سیم پیچهای روتور مطابق استاتور تغییر نماید. و سپس مجدداً پایانه های روتور به حلقه های لغزان متصل گردند.دلیل استفاده از روتور قفس سنجابی به این علت است که میله های استفاده شده در روتور به صورت خودکار و به دلیل عمل القاء طوری خود را آرایش می دهند که تعداد قطبهای روتور و استاتور برابر گردند.
برای درک بیشتر مطالب ذکر شده تصاویر زیر را مشاهده نمایید.

سیم بندی موتور دالاندر (کابل با سطح مقطع بیشتر برای دور تند و کابل با سطح مقطع کمتر برای دور کند)

روتور قفس سنجابی
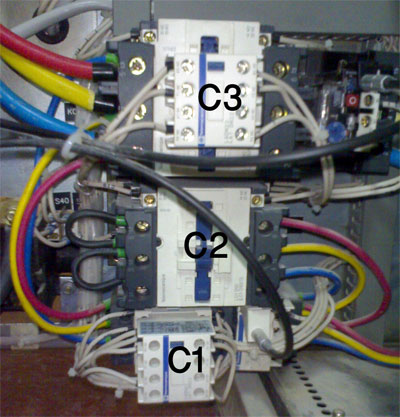
مدار قدرت موتورهای دالاندر
امین و احسان ساعت 22:33
آخرين عناوين
آرشيو
- خرداد ۱۴۰۳
- اردیبهشت ۱۳۹۹
- آذر ۱۳۹۵
- شهریور ۱۳۹۵
- دی ۱۳۹۴
- آذر ۱۳۹۴
- مرداد ۱۳۹۴
- مرداد ۱۳۹۳
- مرداد ۱۳۹۲
- تیر ۱۳۹۲
- دی ۱۳۹۱
- فروردین ۱۳۹۱
- اسفند ۱۳۹۰
- بهمن ۱۳۹۰
- دی ۱۳۹۰
- آذر ۱۳۹۰
- آبان ۱۳۹۰
- مهر ۱۳۹۰
- تیر ۱۳۹۰
- خرداد ۱۳۹۰
- آبان ۱۳۸۹
- مهر ۱۳۸۹
- شهریور ۱۳۸۹
- مرداد ۱۳۸۹
- تیر ۱۳۸۹
- خرداد ۱۳۸۹
- اردیبهشت ۱۳۸۹
- فروردین ۱۳۸۹
- اسفند ۱۳۸۸
- بهمن ۱۳۸۸